We Developed 44 Devices in 6 Years, Selling Them Worldwide — And It's Still Not Enough
A deep dive into how a tiny team of hydroacoustic engineers built 44 underwater communication and navigation devices from scratch, bootstrapping their way from a colleague's unfinished veranda to international exports.
There are six of us now, counting the CEO — two programmers, two electronics engineers, and an assembler. That's nominal, of course, since in practice everyone does assembly. Plus an accountant — the seventh.
We started as three — a programmer, an electronics engineer, and the CEO.
We develop and manufacture electronics. More specifically — hydroacoustic equipment: communication and navigation systems.
Just yesterday, while preparing some presentation, someone asked me something like: "Can we say we've developed more than twenty different devices over our entire history?"
Precision is the courtesy of kings, as they say. So I started writing down the devices one by one — everything we'd managed to create.
Here's an interesting thing: you remember every device, you keep in your head some details of the firmware and the pairing protocol, the assembly peculiarities of different devices, but the total number somehow eludes you.
Prologue
I'll take a short detour to explain where all of this came from.
My mother worked as a programmer — she wrote programs for the ES EVM mainframes in the Soviet era. In elementary school, I already had a programmable calculator at home and was writing simple programs on it. Then came the ZX Spectrum, then a 386DX, then university.
I studied at the Volgograd Polytechnic but didn't initially get into my preferred program. After working various jobs in electronics and control systems, I eventually ended up at a research institute in 2009 where my colleagues and I experimented with hydroacoustic technology.
The turning point came in 2013 when a supervisor suggested I should go abroad. This led to a position as Research Associate at the University of Manchester in 2014, where I worked on underwater acoustic navigation systems for autonomous underwater vehicles exploring radioactive retention ponds near the Sellafield nuclear facility.
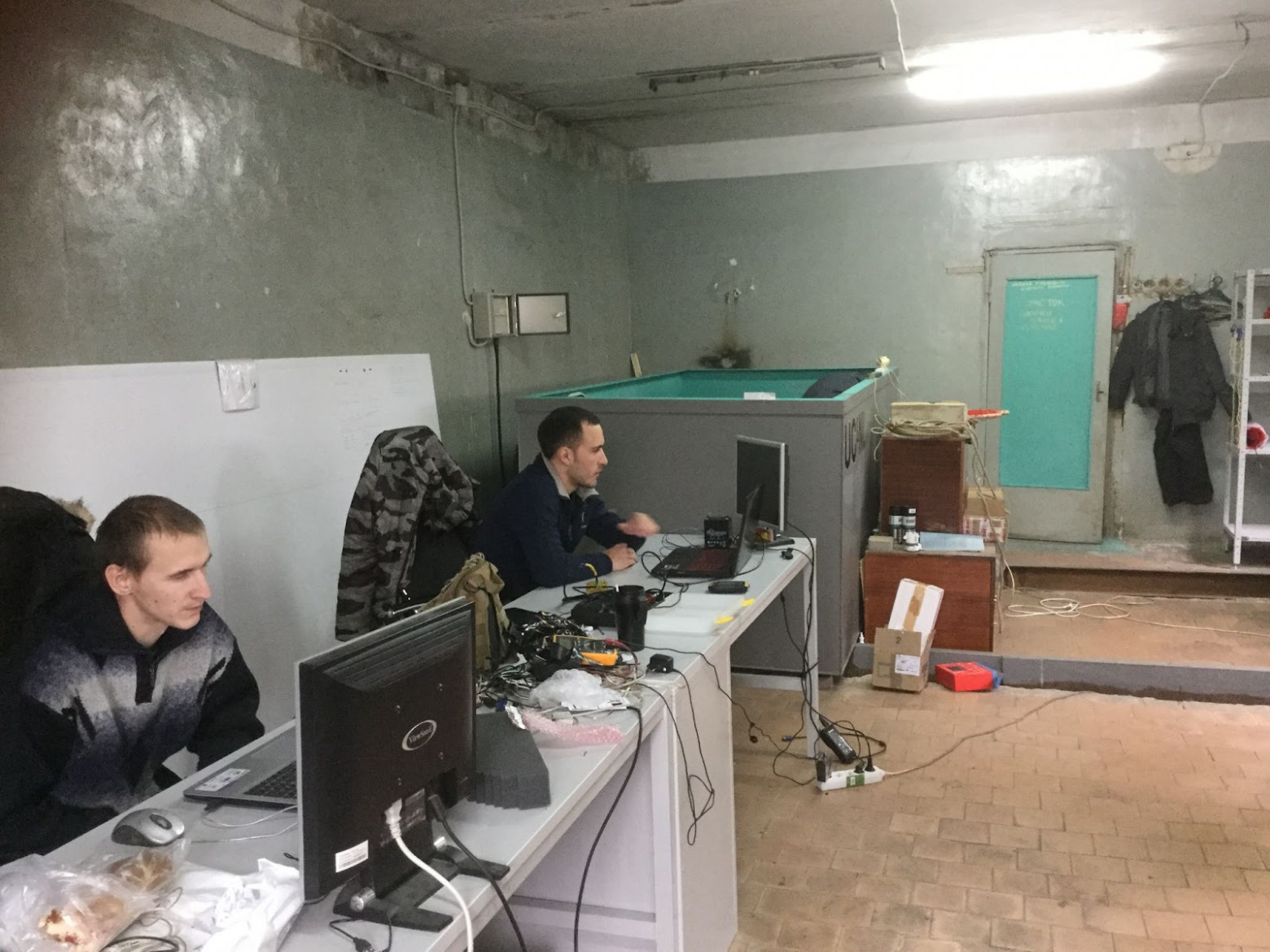
Working at a world-class university was a fantastic experience. I had access to an Olympic-sized pool for experiments, advanced testing equipment, and academic colleagues. But I had a contract, and it was time to decide what to do next.
In May 2015, I returned and together with my collaborator Stas and our Moscow-based director, we founded the company. We initially worked from Stas's unfinished veranda, using sand baths for component heating and whatever makeshift workspaces we could arrange.
The First Devices: Summer 2015
By mid-summer 2015, the team had four devices ready:

RedBase — a hydroacoustic buoy transmitter. The surface part of a long-baseline underwater GPS system. The buoy floats on the surface, and a submerged hydroacoustic antenna transmits navigation signals to underwater receivers.

RedNode — a navigation receiver designed for integration with underwater robots. It receives signals from RedBase buoys and calculates its own position, outputting coordinates over a serial interface.

RedNav — a wearable diver navigation receiver with a built-in display. The diver carries this device and can see their position relative to the navigation buoys.

RedGTR — a coded hydroacoustic modem. Our first communication device, capable of transmitting short coded commands underwater.
These four devices represented our initial product offering, developed through intense collaboration between the hardware and software specialists.
Growing Pains and New Products: 2016

We then developed RedLine — a higher-bandwidth acoustic modem, and Natrix — a simplified variant for specific applications.
Around the same time, we were asked to make a pressure gauge with RS-485 transmission and screen display. Specifically for divers working on an umbilical tether. We turned up our noses a bit — "where's the hydroacoustics in that?" But we took it on and got it done fairly quickly.
Interim tally for mid-2016: 8 devices.
Twice as Many Programmers

In 2016 we started feeling an acute shortage of hands. We fairly quickly pulled one of our long-time colleagues from the research institute. The number of programmers doubled, and now we could develop USBL systems — we had a dedicated specialist.
USBL stands for Ultra-Short Baseline. It's a class of systems where the position of an underwater object is determined by range-and-bearing measurement.
Originally, Stas and I had sworn off USBL work, but under public pressure we changed our minds.
While the transponder beacon differed from the coded modem RedGTR only in firmware and slightly in component values of the analog path, the phased array antenna is a rather complex thing in every sense.
We named the system Zima ("Winter" in Russian). I suggested the name because I liked the surname of the criminal character played by actor Garmash in the film "Piranha Hunt."
Meanwhile, let's keep counting: the transponder beacon is number 9, and the antenna is number 10.
In this version of the system, we applied an interesting solution — so-called two-way navigation, for which we also received a patent.
I distinctly remember that a fully working prototype went to the next exhibition (the biennial) by the end of June 2017.
A Hot Period: 2016–2017

The 2016–2017 period was intensely busy. We hired another person — an assembler. We rented a workspace and started renovations.
While everyone was partially working from home due to the renovations, we made several more devices.
First, diver telephony in two devices:
- RedPhone-OS — a surface station
- RedPhone — a diver station
Underwater telephony is a treacherous thing: despite the relative simplicity of the communication technology, there's a lot of hassle with masks and headsets. The first version of our diver device was made very much in the style of the OTS BuddyPhone. This was on one hand a big miss — the design was extremely poor — but on the other hand, it provided enormous experience.
That's 11 and 12.

Around the same time we made the "diver drive" Vostok. A very interesting concept: there's a surface unit with a lowerable antenna and any number of wearable devices.
It works as follows: the surface unit emits a special signal at regular intervals. The wearable device — an acoustic compass — has a simplified version of a phased antenna array and can determine the horizontal angle of signal arrival.
The trouble was that we made a design error, and a problem arose with sound propagation through the glass of the wearable device. Because of this, the device didn't work properly. But we'll definitely return to this concept when we have free time.
Let's just note these two devices but not count them.

Somewhere in this same timeframe, someone asked us to simply sell antennas. We approached the matter thoroughly and expanded our product line by four more devices, one of which uses a Free Flooded Ring design and is rated for depths up to 1,000 meters.
Based on the 1,000-meter antenna, we had to create a version of the Zima USBL system with an OEM transponder beacon and antenna rated for 1,000-meter depth. We didn't design the housing itself, since that's not quite our area, but we had to significantly rework the electronics and firmware. That's one more device.
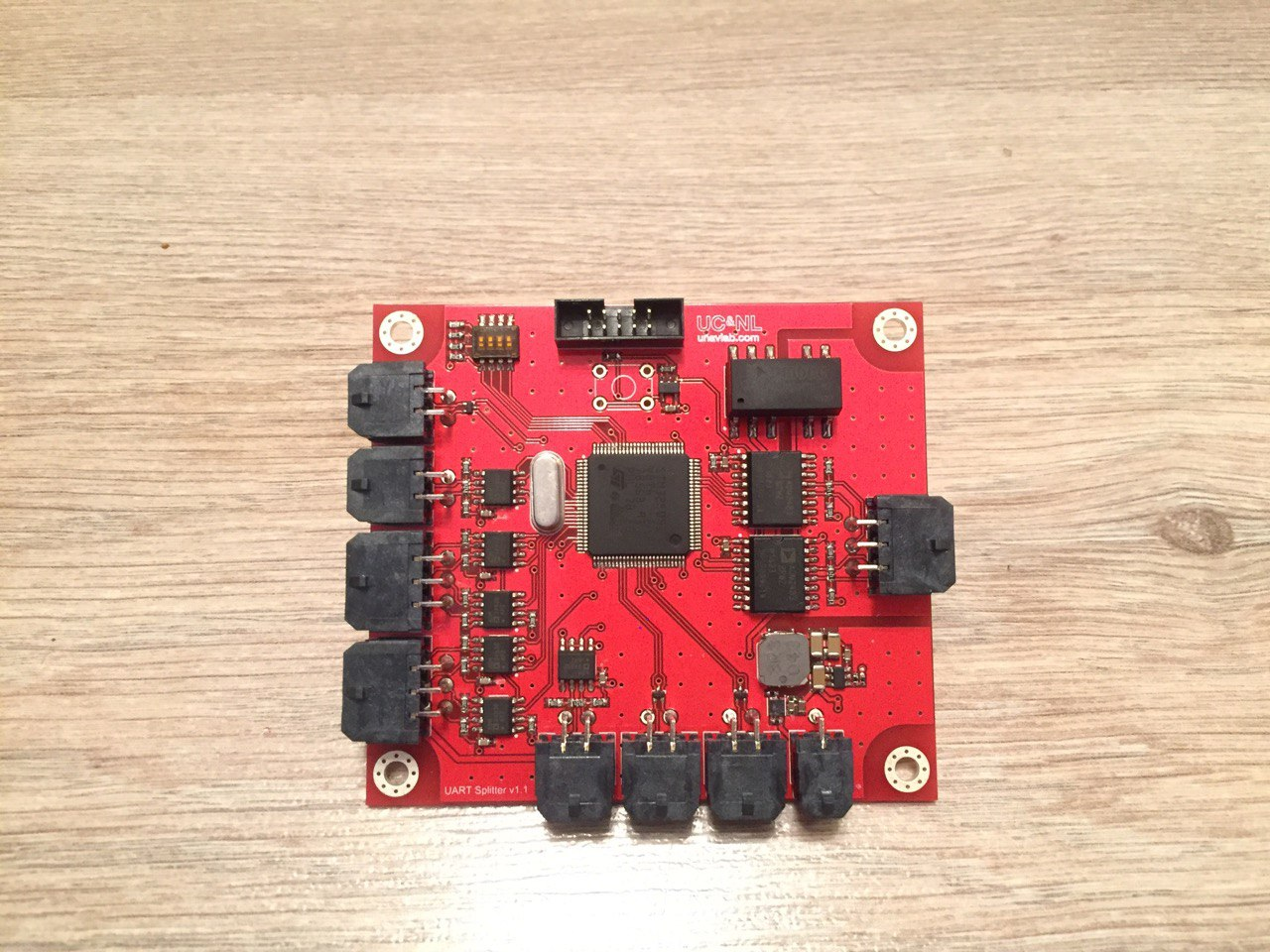
While scrolling through all this in my head, I recalled yet another device made around this period — the UART Splitter. No hydroacoustics there either, it's simply a multiplexer for 8 serial interfaces into one.
Thus the device count increases to 17.
All of these things also went to the well-known biennial exhibition.
Analog Man in a Digital World

Meanwhile, we were lacking a skilled and experienced analog electronics specialist.
Into our tight circle of like-minded individuals, we wanted to admit only a proven and reliable person. I would even use the definite article, if Russian had one, because we knew him and had been inviting him for some time.
In a certain sense we were lucky that centrifugal processes at the research institute exceeded some threshold of activity, and even the most responsible people began thinking about a change of scenery. So in March 2018, Andrey joined us.
Andrey brought a flurry of improvements and refinements to our existing products, completely redesigned the electronics in the surface telephone station, and single-handedly designed the power and switching unit for our Zima. Without overthinking it, he named it Bat&Link Box.

The unit has an onboard LiFePO4 (lithium iron phosphate) battery rated at 40 or 60 Wh, one or two RS-422 channels with USB connection to a PC. It features automatic power source selection — external or built-in battery.
It protects against short circuits on the output, overvoltage on the input, reverse polarity, damage, the evil eye, removes the crown of celibacy, and so on.
The USBL antenna draws up to 3A at 12 volts during transmission, the transmission lasts hundreds of milliseconds, and the cable powering the antenna and carrying data in the standard configuration is 10 meters long (sometimes we make 20-meter versions). So ensuring proper power delivery required some effort.
While we increase the device counter to 18, I'll note that in all such devices we use 2mm stainless steel as the front panel. Labels are applied by laser engraving.
Inverted GPS: RedWave Lite

We developed an alternative navigation approach for situations where standard buoy deployment wasn't practical. Instead of having transmitting buoys on the surface, this system reversed the concept: buoys became receivers while a pinger transmitted from the underwater object.
Users position buoys on water or ice, attach a pinger to their submersible vehicle, and receive position coordinates on a PC. The system included four receiving buoys, an autonomous pinger with battery power, and a USB radio dongle for computer connection.
The navigation processing software was released as open source, making the technology more accessible to researchers.
This added three more devices to our lineup.
Underwater Telephony Evolution: RedPhone-D and RedPhone-DX

We developed an intermediate version — RedPhone-D — with a polyacetal housing containing serviceable 18650 battery compartments while keeping all electronics fully encapsulated in polyurethane.
Recognizing the design flaws of earlier versions, the engineers eliminated the bulky plastic housing entirely, creating the fully potted RedPhone-DX — a completely sealed device encapsulated in polyurethane.
Key improvements included:
- Integrated lithium iron phosphate batteries (non-removable)
- Radio-based configuration through a separate dongle for channel switching
- Custom piezoceramic push-button technology replacing unreliable solenoid designs
- Custom hydrophone microphone based on piezoelectric elements, dramatically reducing maintenance
The custom microphone solved problems with commercial alternatives that corroded in saltwater environments, offering vastly superior durability compared to competing products. It also reduced the cost of spare parts for customers.
A separate radio dongle was created to configure the RedPhone-DX wirelessly, since the sealed design precluded physical access to settings.
The uWave: Our Greatest Hit
I had been slowly developing new signal processing code in my spare time. The idea was simple: could we fit a fully functional acoustic modem into our smallest cylindrical housing? Everyone told me the form factor was too small for such a device.
The result was the uWave — an extraordinarily compact hydroacoustic modem that fit all the necessary electronics into a small ring. The modem could measure distance, had a short command mode, and supported three data rates: 78, 156, and 314 bps.
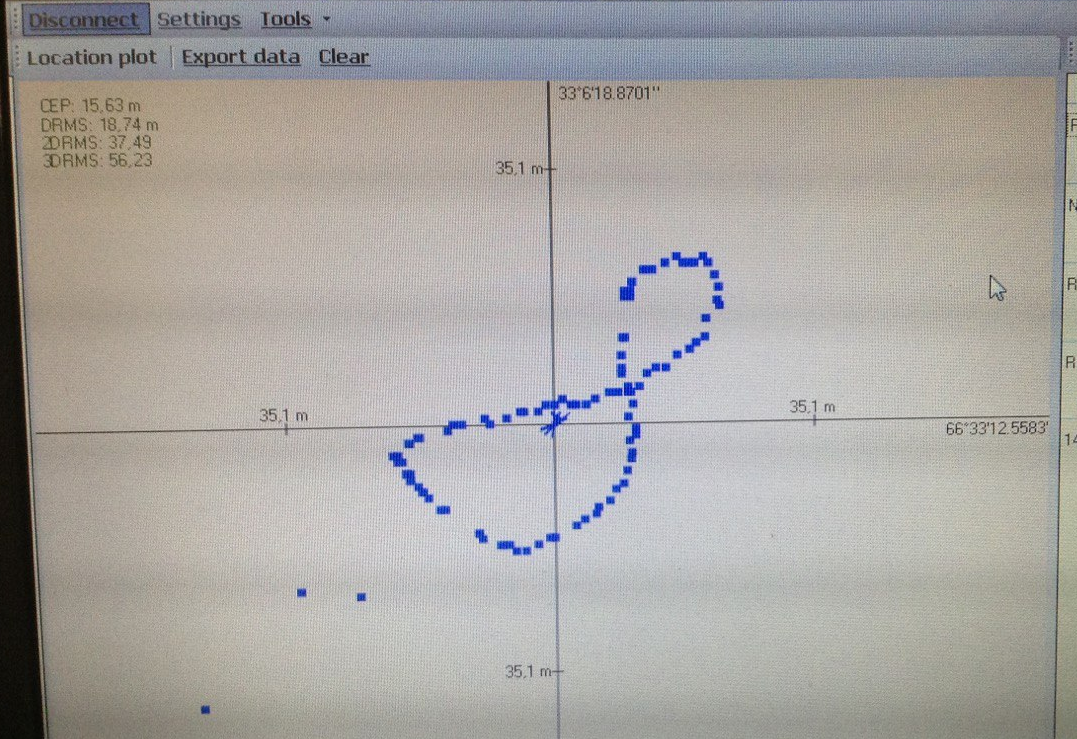
According to our documentation, maximum communication range is approximately 1,000 meters under standard conditions, though in field testing we achieved 1,092 meters.
The uWave became our most commercially successful product, spawning an entire family of variants:

- uWave — the original compact modem in the smallest housing
- uWave USBL — includes a phased array antenna for directional detection, combining modem and positioning capabilities in one device
- uWave Max — an enlarged version in a bigger cylindrical housing, supporting extended 3,000-meter range
- uWave Max OEM — an industrial variant of the larger model with similar extended range

All variants maintain acoustic protocol compatibility despite significant internal differences in processing architecture and antenna design. These devices are sold from Norway to Venezuela and everywhere in between.
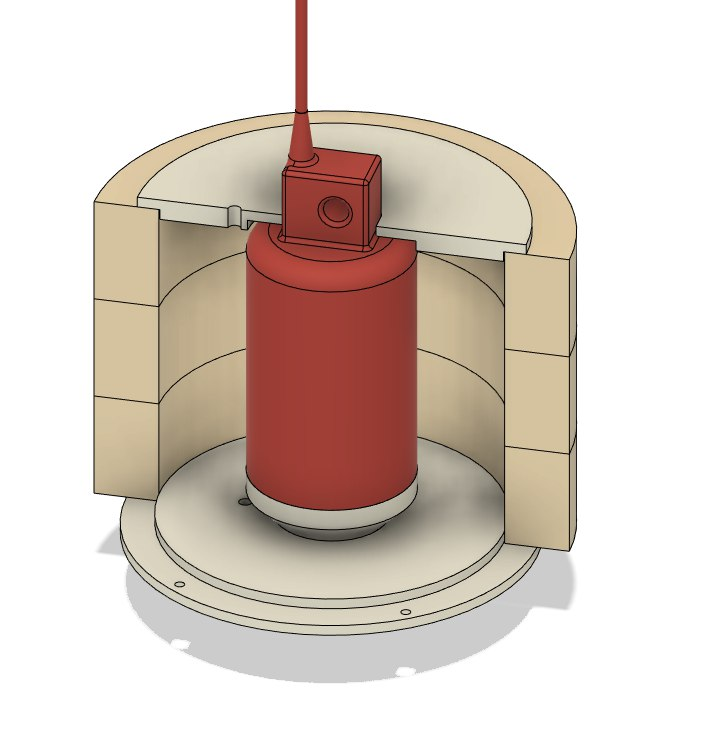
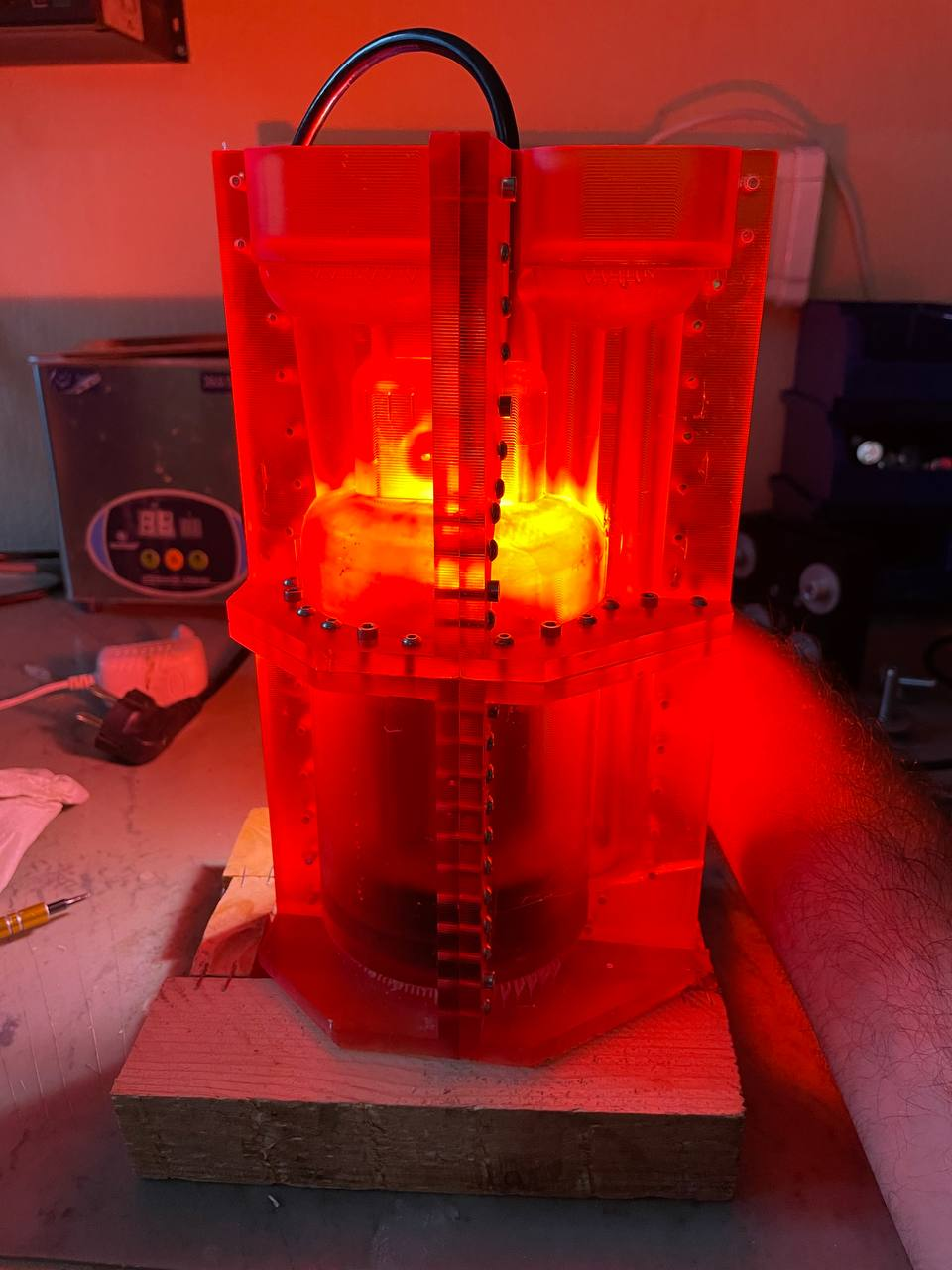
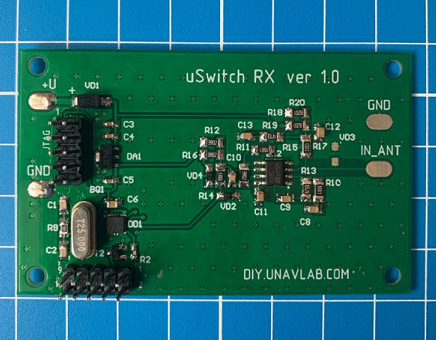
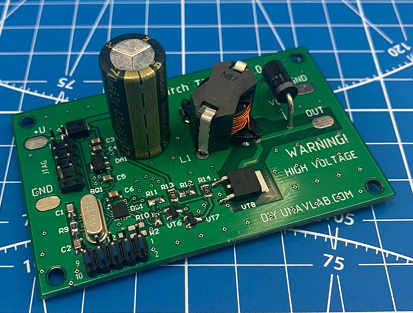
The uSwitch Experiment
We developed an underwater remote control system — uSwitch — featuring a simple receiver board and a simple transmitter board operating on battery power with approximately 100-meter effective range. The system supports four commands transmitted acoustically through water.

We had high hopes for this project — the idea was to create an accessible product that hobbyists and small companies could use. But the cost of the required hydroacoustic transducer (around 12,000 rubles) proved prohibitively expensive for the hobbyist audience we'd hoped to reach. Commercially, it didn't take off. But it was a valuable lesson in understanding market demand.
Acoustic Release System

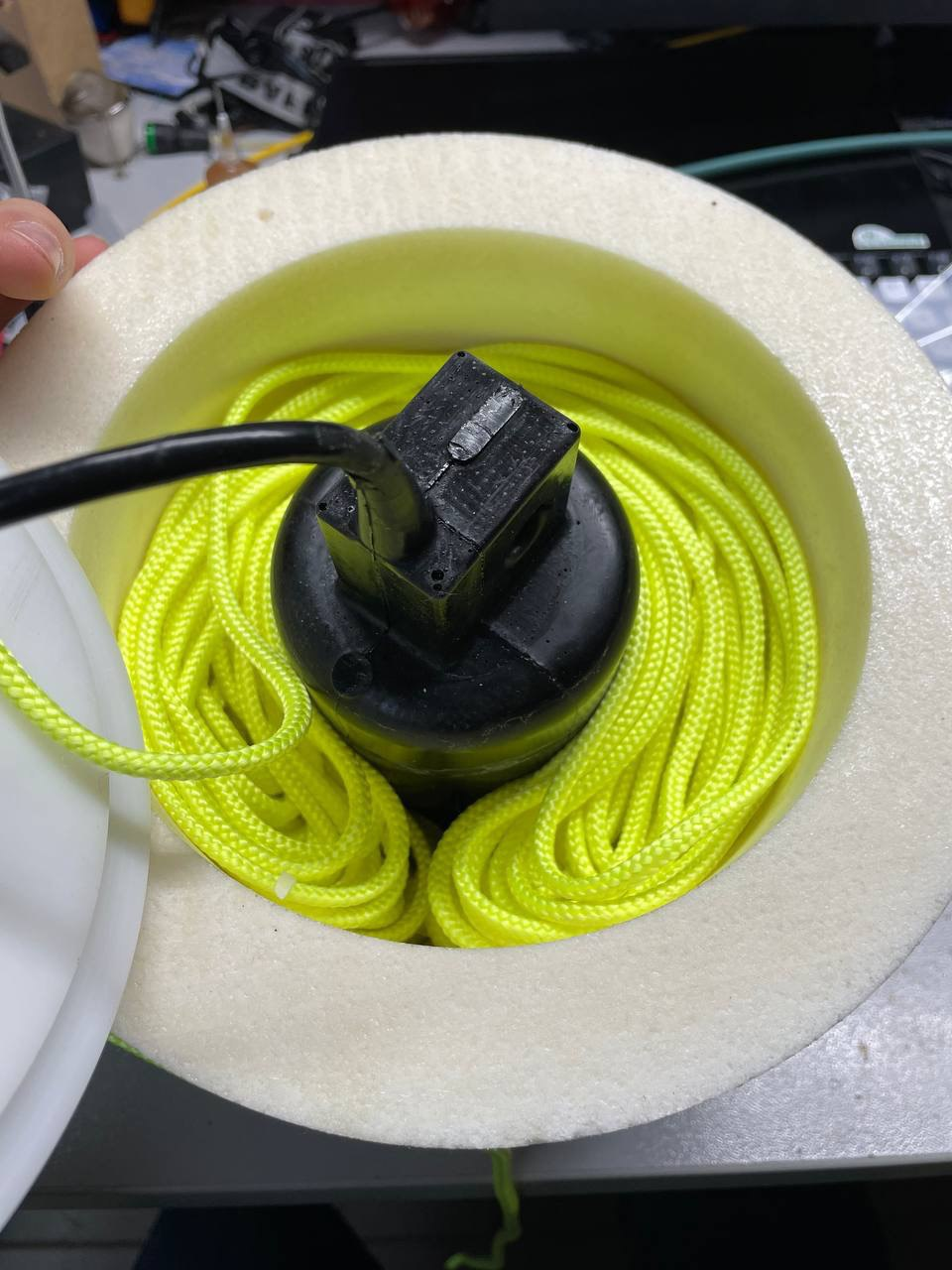
We developed an acoustic release system designed to sit on the seafloor for extended periods. When it receives the correct hydroacoustic command from a surface station, it unlocks and allows the attached equipment to float to the surface via a buoy.
The device needed to catch one of 64 possible codes, unlock, and surface. Rather than relying on timer-based mechanisms, we incorporated low-power acoustic reception that could operate for two months while searching for the correct signal.

The system consisted of three components:
- An actuator-release mechanism
- An acoustic unit for receiving commands
- A surface control station with galvanic switches for code programming

Development occurred over approximately two months during summer 2022. This required capabilities well outside our typical electronics focus — mechanical design, rope packing, buoyancy calculations.
RWLT Navigation System
RWLT represents an inverted approach to our original RedWave GPS concept. Instead of emitting buoys, RWLT features receiving buoys that detect signals from a submerged pinger. Surface buoys transmit received data via radio to the user's PC, allowing real-time tracking of underwater vehicles overlaid on digital maps.
The system requires four buoys, one autonomous pinger, and a USB radio dongle.
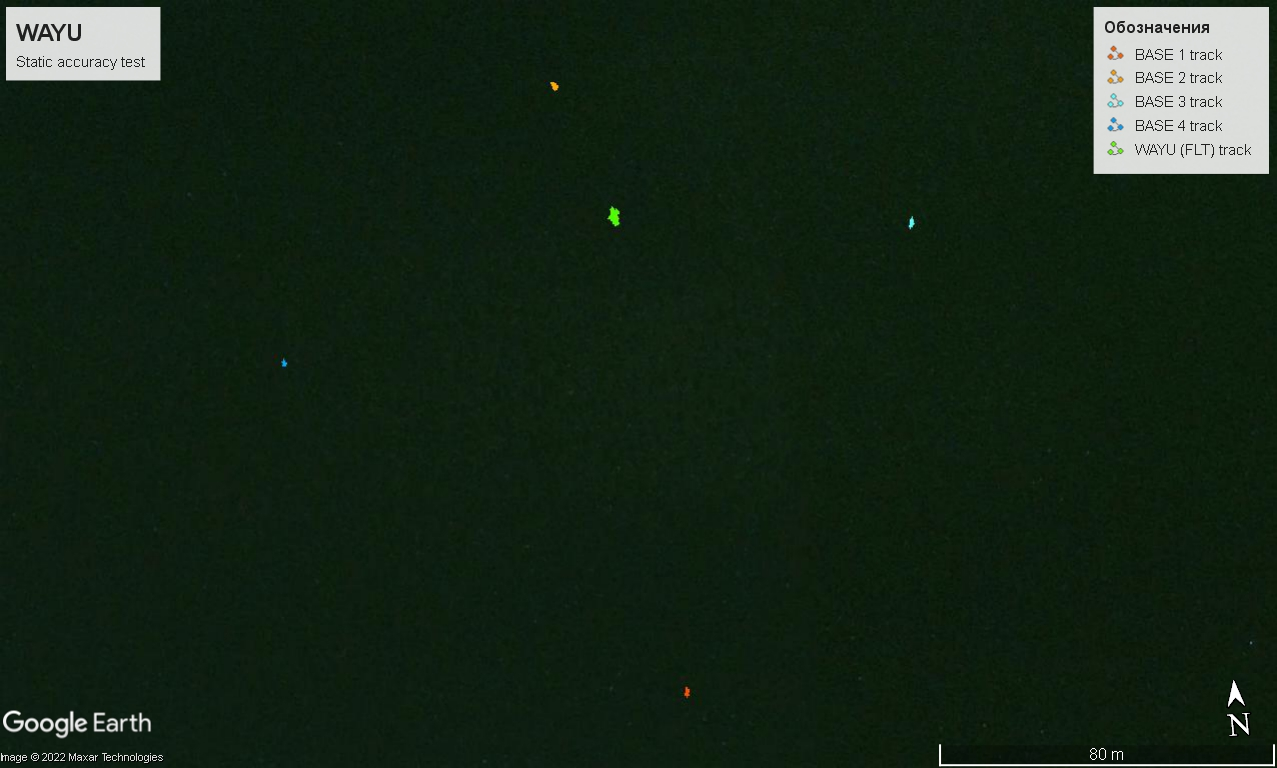
WAYU: Where Are You Underwater

Developed as an affordable navigation alternative, WAYU employs four surface buoys receiving signals from a submerged pinger. Users can deploy buoys from inflatable platforms in calm conditions. While offering reduced range and precision compared to professional systems, it provides accessible underwater positioning for hobbyists and small operations without requiring vessels or rigid mounting hardware.

The navigation software was also released as open source.
Zima2 / Azimuth: The USBL Redesign

This represents a significant redesign of our USBL system, addressing years of accumulated user feedback. Key improvements included:
- Higher operating frequency enabling 1 Hz update rates (versus 0.33 Hz — one position every 3 seconds — previously)
- Simplified serial protocol for easier third-party integration
- Automatic serial port detection in accompanying software
- Streamlined commissioning procedures

The new protocol used the "AZM" designator under NMEA standards, making integration with third-party systems much simpler.
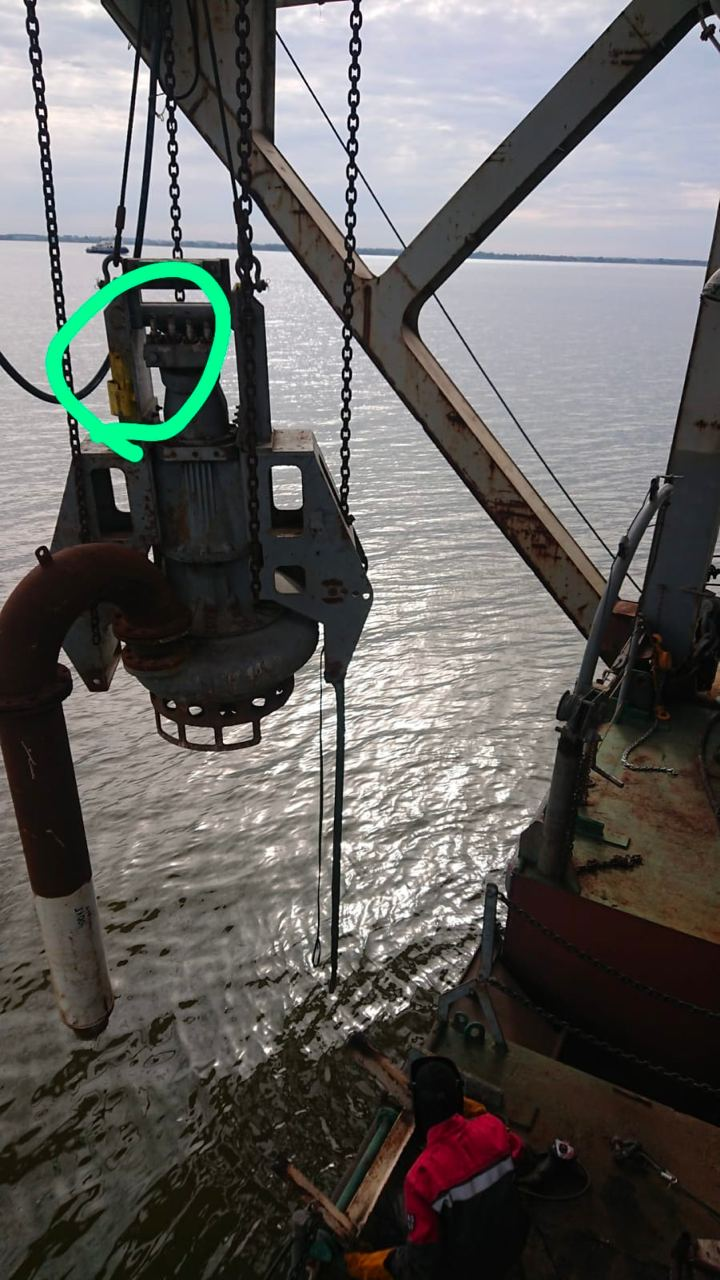
Dredging Equipment: Wireless Depth Monitoring

We engineered a wireless depth measurement system for dredge equipment where traditional cabled sensors experienced repeated failures due to the harsh operating environment. The solution featured a hydroacoustic modem paired with a specialized pressure sensor and a 140 Wh battery supporting 72-hour autonomous operation at 100-meter depths with two-second transmission intervals.

The system was designed to survive icy water conditions and mechanical abuse that destroyed conventional wired solutions.
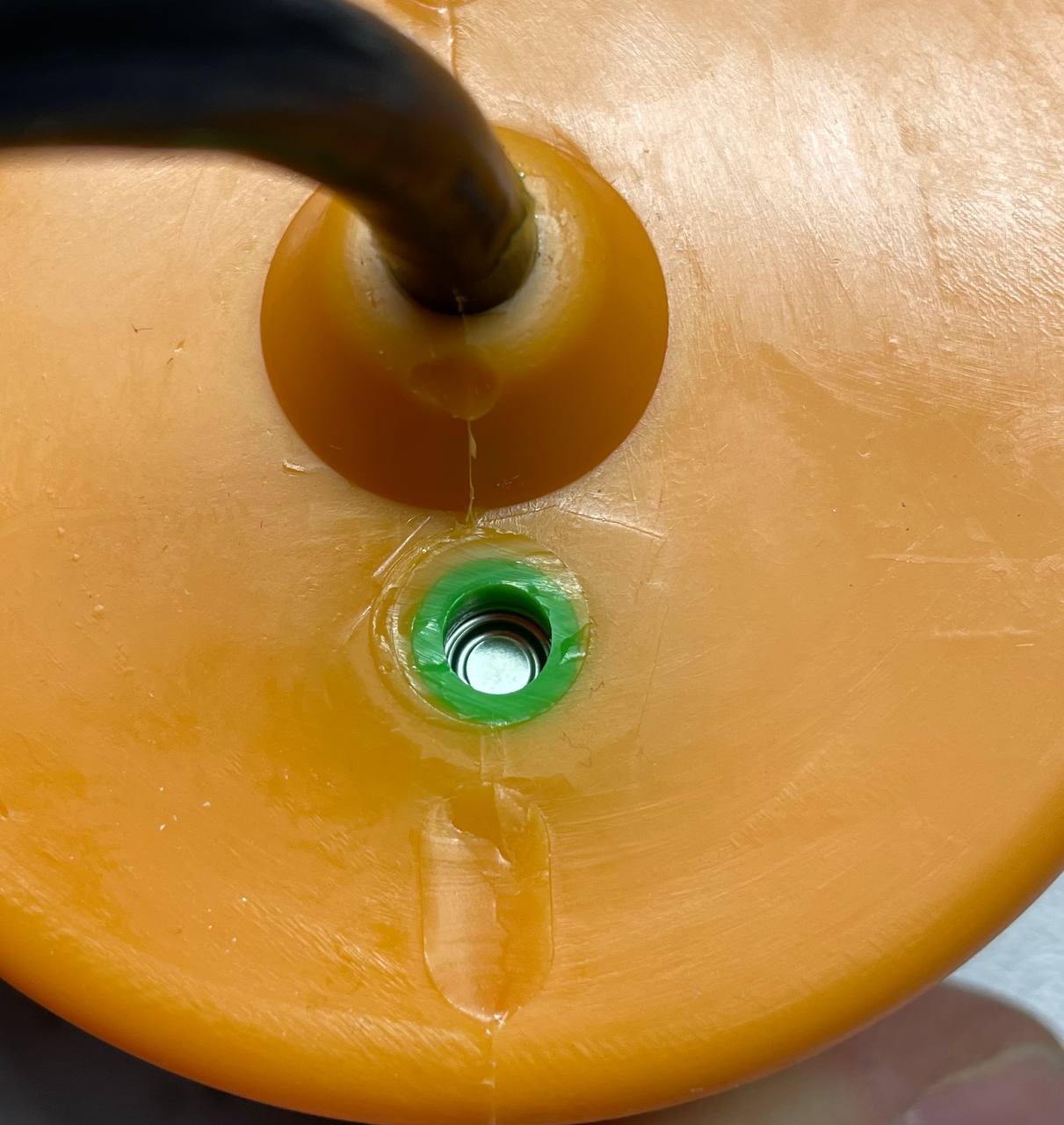
Battery Systems

We created three submersible battery pack configurations using Li-ion and LiFePO4 chemistry with integrated Battery Management Systems. Notable features included:
- Water-activated switching — the battery turns on when submerged and off when removed from water
- Short-circuit protection
- Compact cylindrical housings rated for significant depth
These replaced earlier NiMH battery designs that suffered from poor shelf life and complex user management. The water-activation feature eliminated user error in power management.
Exports and Skolkovo
Exporting non-standard electronics from Russia represents enormous bureaucratic complexity. The regulations typically focus on basic parameters like carrier frequency and transmission range rather than application-specific technology restrictions.
Our Skolkovo residency status proved essential for international distribution. It substantially simplified the certification processes and helped distinguish our civilian communication systems from restricted military applications. Without Skolkovo's support, exports would have been nearly impossible.
We currently sell to more than 10 countries worldwide.
Three Patents

Along the way we received three patents on underwater navigation methods, including our two-way navigation approach and the inverted GPS concept.
Conclusion
So, is 44 devices in six years a lot or a little? I honestly don't know. What I do know is that we worked at maximum capacity, with complete dedication.
We don't have a purchasing department, a marketing department, or HR. We don't have team-building events — instead, we do field testing in actual bodies of water. We don't have sophisticated project management — we have a whiteboard with tasks and deadlines.

Sometimes I wonder if we could do things more efficiently. Maybe we could have developed 60 devices if we'd organized differently. Or maybe we would have developed only 20 and burned out.

The truth is, we build things because we can and because people need them. Each device started as someone's problem that needed solving. And as long as the ocean is full of unsolved problems, we'll keep building.
We share a lot of our software openly, we publish our protocols and specifications, we write articles about our methods. Not because we're not afraid of competition — but because we believe the field of underwater technology needs more participants, not fewer.
Forty-four devices. Seven people. Six years. And we're just getting started.